This project was released by BERGOIN Raphäel and BOUT Clément, students in the University of Cergy-Pontoise. It contains some examples and explanation of our understanding of the MAVLink C library (refer to this github project to see the entire MAVLink c library project). This explanation are made for beginners in MAVLink by beginners.
As part of our studies, in the Master 1 Computer sciences and engineering of complex systems (IISC), we work with the ETIS laboratory to release a sort of ground station (GS) in C for a 3DR Solo Drone with the aim to implement a neural network able to control the drone by using this GS.
In order to realize our project we have decided to use the c_library_v1 (MIT-licenced project) and we do not find an easy tutorial to understand MAVLink and the C library. That is why we are going to summarize all the information we have found about MAVLink and the C library. We will also expose our understanding of the MAVLink v1 communication and the C library across some examples in the folder examples/. We are not so presumptuous to consider that our understanding and using are the best way to use the c_library_v1 and MAVLink. It would be nice to tell us our mistakes or misunderstanding.
To understand this project you have first to understand MAVLink protocol.
Micro Air Vehicle Link (MAVLink) is a very lightweight messaging protocol for communicating with drones (and between onboard drone components).
MAVLink can be used in UART and UDP connection. You can refer to this article written by Pedro Albuquerque which explain MAVLink protocol step by step. But we will do an abstract of all the informations we have compiled about MAVLink. We start with the common structure of packets.
For performance reasons packet's informations are binary, the common frame's size is in range [8-263] bytes.
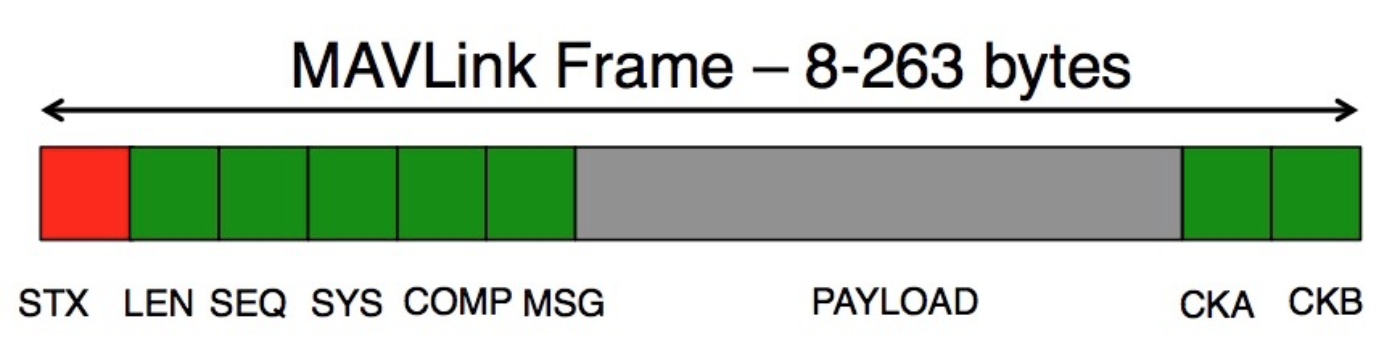
| Byte index | Content | Value | Explanation |
|---|---|---|---|
| 0 | Packet start sign | for MAVLink v1.x: 0xFE and 0xFD for v2.x | Indicates the start of a new packet and the MAVLink packet version. |
| 1 | Payload length | 0x00 to 0xFF | Indicates the length of the packet's payload. |
| 2 | Packet sequence | 0x00 to 0xFF | Because of UDP connection, we need to count packets to be sure no packet were lost. |
| 3 | System ID | 0x00 to 0xFF | ID of the Sending system (255 for ground control and 1 for vehicle). |
| 4 | Component ID | 0x00 to 0xFF | ID of the sending component. |
| 5 | Message ID | 0x00 to 0xFF | ID of the message, the ID defines the size of the payload and its content. |
| 6 to (n+6) | Data | (0 - 255) bytes | Message's data, it depends on the message ID. |
| (n+7) to (n+8) | Checksum | 2 bytes | ITU X.25/SAE AS-4 hash from byte 1 to n+6 |
The MAVLink message is a stream of bytes that has been encoded by a Mission Planner (MP) or a Ground Station (GS). Each message has a message ID (all common ids) and a payload, payload's content depends of the message ID. There is common messages (see common.xml) and specific messages for each autopilot (e.g. ardupilot or autoquad). All common messages are not implemented for each autopilot but they are complementary. We will describe the heartbeat message:
The heartbeat is one of the most important message, GS have to send it each second to notify it is alive and the connection is available.
| Field Name | Type | Values | Description |
|---|---|---|---|
| type | uint8_t | MAV_TYPE | The type of the MAV |
| autopilot | uint8_t | MAV_AUTOPILOT | The autopilot class |
| base_mode | uint8_t | MAV_MODE_FLAG | System mode bitmap |
| custom_mode | uint32_t | Specific autopilot's flags | |
| system_status | uint8_t | MAV_STATE | System status |
| mavlink_version | uint8_t | MAVLink version |
For example, for a heartbeat, the pack message will looking to this :
| MAVLink version | Payload length | Packet sequence | Systeme ID | Component ID | Message ID | Data | Checksum |
|---|---|---|---|---|---|---|---|
| FE | 09 | 00 | FF | 00 | 00 | 00 00 00 00 06 03 C0 04 03 | F5 C0 |
| Start of a packet of MAVLink v1.0 | Len of the payload | Mean it's the first message we sent | Mean we are Ground Control | For GC no need to specify Comp ID | Refer to Heartbeat's ID |
Data :
- type: MAV_TYPE_GCS (0x06)
- autopilot: MAV_AUTOPILOT_ARDUPILOTMEGA(0x03)
- base mode: MAV_MODE_FLAG_SAFETY_ARMED + MAV_MODE_FLAG_MANUAL_INPUT_ENABLED = (0xc0)
- custom mode: No custom mode(0x00 00 00 00)
- systeme status: MAV_STATE_ACTIVE(0x04)
- mavlink_version: 0x03
There is different types of messages, some messages will just send data (like the heartbeat), other will do something on the MAV (like COMMAND_LONG, some commands here) and other will request some information (like REQUEST_DATA_STREAM).
You can refer to this README to see an explanation of the c_library_v1 to expedite your understand. We put also some example of the lib implementation tested on a 3DR Solo here.
TODO